
Page 72 - 《橡塑技术与装备》2024年10期
P. 72
橡塑技术与装备 CHINA RUBBER/PLASTICS TECHNOLOGY AND EQUIPMENT
此套 1500 生产线的 SBZ1500R 任意扩口成型机 和通过通信单元连接的系统
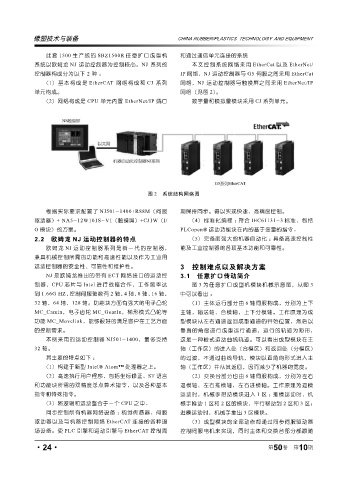
系统以欧姆龙 NJ 运动控制器为控制核心。NJ 系列的 本文控制系统网络采用 EtherCat 以及 EtherNet/
控制器构成分为以下 2 种: IP 网络,NJ 运动控制器与 G5 伺服之间采用 EtherCat
(1)基本构成是 EtherCAT 网络构成和 CJ 系列 网络,NJ 运动控制器与触摸屏之间采用 EtherNet/IP
单元构成。 网络(见图 2)。
(2)网络构成是 CPU 单元内置 EtherNet/IP 端口 数字量和模拟量模块采用 CJ 系列单元。
图 2 系统结构网络图
根据实际要求配置了 NJ501-1400+R88M(伺服 期保持同步。得以实现快速、高精度控制。
驱动器)+ NA5-12W101S-V1(触摸屏)+CJ1W(I/ (4)标准化编程 :符合 IEC61131-3 标准,包括
O 模块)的方案。 PLCopen® 运动功能块在内的基于变量的指令。
2.2 欧姆龙 NJ 运动控制器的特点 (5)完备而强大的机器自动化 :具备高速控制性
欧姆龙 NJ 运动控制器系列是新一代的控制器, 能及工业控制器的各项基本功能和可靠性。
兼具机械控制所需的功能和高速性能以及作为工业用
运动控制器的安全性、可靠性和维护性。 3 控制难点以及解决方案
NJ 是欧姆龙推出的带有 ECT 网络接口的运动控 3.1 任意扩口传动简介
制器,CPU 芯片与 Intel 进行战略合作,工作频率达 图 3 为任意扩口成型机模块机械示意图,从图 3
到 1.66G HZ,控制伺服轴数有 2 轴, 4 轴, 8 轴, 16 轴, 中可以看出 :
32 轴,64 轴,128 轴。功能块方面有强大的电子凸轮 (1)主体运行部分由 6 轴伺服构成,分别为上下
MC_Camin,电子齿轮 MC_GearIn,梯形模式凸轮等 主轴,输送轴,合模轴,上下分模轴。工作原理为成
功能 MC_Movelink,能够很好的满足客户在工艺方面 型模块从左右通道返回成型通道的开始位置,然后以
的控制需求。 垂直的角度进行成型运行通道,运行的轨迹为矩形,
本例采用的运动控制器 NJ501-1400,最多支持 这是一种梭式运动曲线轨迹。可以看出成型模块在主
32 轴。 轴(工作区)的进入处(合模区)和返回处(分模区)
其主要的特点如下 : 的过渡,不通过曲线导轨,模块以直角的形式进入主
(1)构建于新型 Intel® Atom™ 处理器之上。 轴(工作区)并从其返回,因而减少了机器的宽度。
(2)高速执行用户程序,包括坐标修正、 ST 语言 (2)交换台部分也由 6 轴伺服构成,分别为左右
和功能块所需的双精度浮点算术指令,以及各种基本 退模轴,左右推模轴,左右进模轴。工作原理为退模
指令和特殊指令。 运动时,机械手带动模块进入 1 区 ;推模运动时,机
(3)将逻辑和运动整合于一个 CPU 之中。 械手推动 1 区和 2 区的模块,平行移动到 2 区和 3 区;
同步控制所有机器网络设备 :视觉传感器、伺服 进模运动时,机械手推出 3 区模块。
驱动器以及与机器控制网络 EtherCAT 连接的各种现 (3)成型模块的全部动作都通过同步伺服驱动器
场设备。使 PLC 引擎和运动引擎与 EtherCAT 控制周 控制伺服电机来实现,同时主体和交换台部分都跟随
·24· 第 50 卷 第 10 期